ROS robotplatform
Találat: 47
Kulcsszavak: ROS robotplatform / nyílt forráskódú robotplatform / ROS robot készlet
A termékek öt előnye
A termékek öt előnye
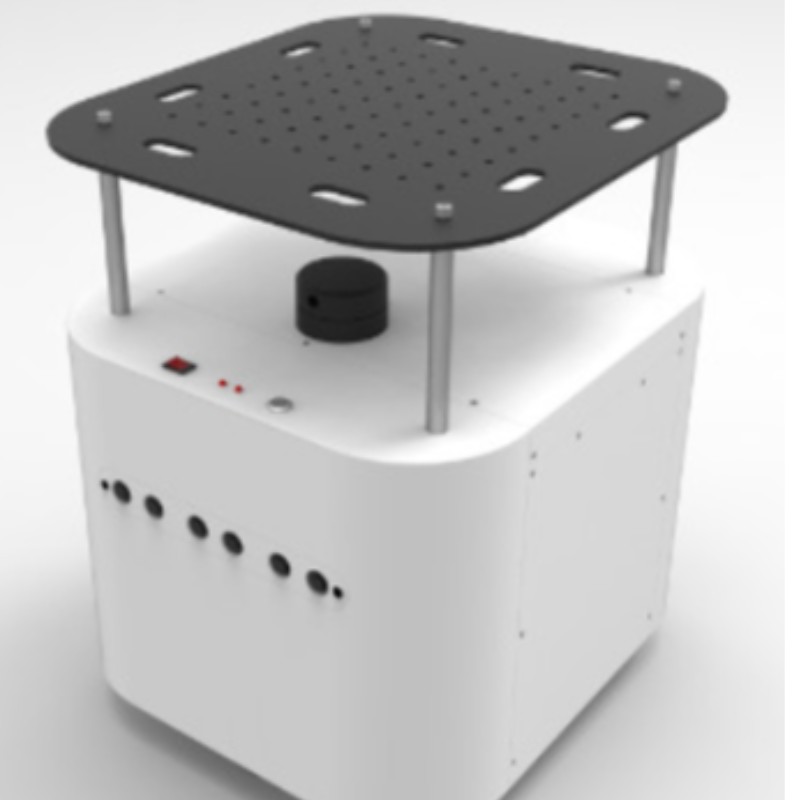
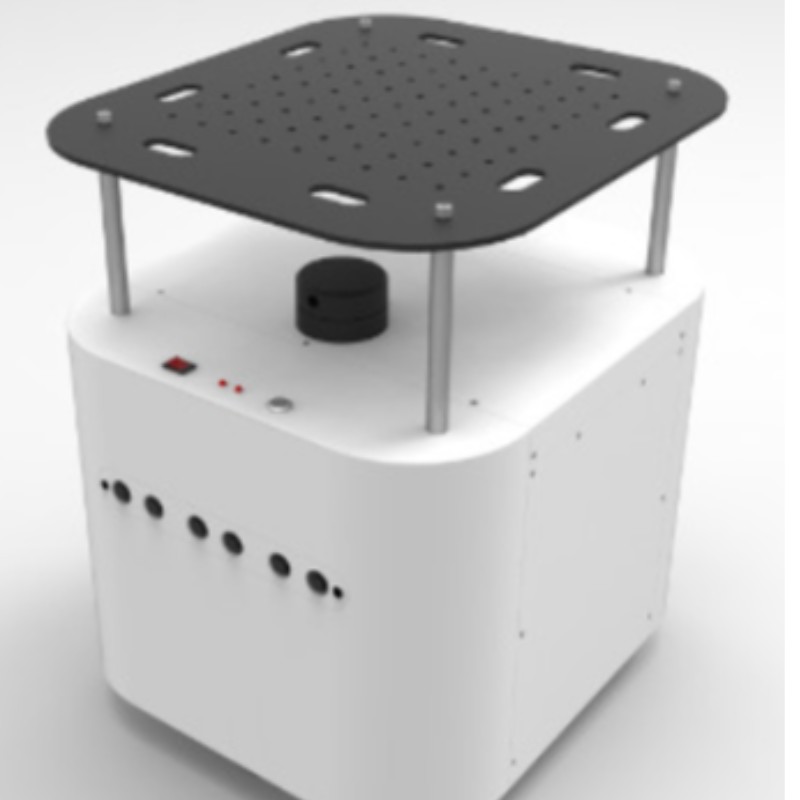
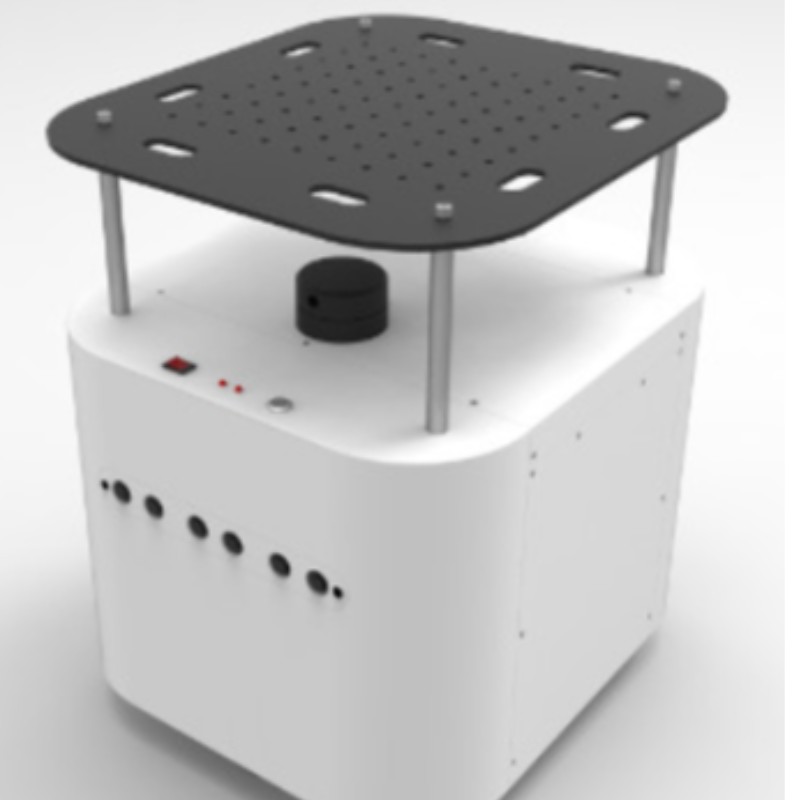
- Az YZ-01 ROS robotplatform egy kétkerekű differenciálmű és nagy terhelésű robotmozgató alvázplatform, amely ROS architektúrán alapul. Nagyon alkalmas ROS robot rajongók, főiskolai hallgatók, valamint kis- és középvállalkozások K + F mérnökei számára.
- Az alváz platform egy integrált kerékagy, nagy hatékonysággal és nagy terheléssel. A peron 50KG-ig terhelhetõ, a maximális sétasebesség másodpercenként akár 1 métert is elérhet. Az YZ-01 beépített DCDC energiaátalakító modulja négy különféle feszültséget képes biztosítani: 5 V, 12 V, 19 V és 24 V, ami alapvetően meg tudja oldani a számítógépes alaplapok és a szenzorok többségének tápellátási problémáit, amelyeket a robotnak hordoznia kell.
- Annak érdekében, hogy a fejlesztők megkönnyítsék a mélyreható kutatást, a ROS platform beépített Intel Core-i5 ipari PC-vel rendelkezik, és telepítette az UBUNTU 16.04 O \/ S + ROS Kinetic csomagokat. Ugyanakkor, mint a többi ROS platform robot, az YZ-01A ROS robot nyílt forráskódú alapvető ROS alkalmazási példákat és alapvető mozgásvezérelt csomóponti programokat is kínál, amelyek lehetővé teszik a fejlesztők számára, hogy nagyon egyszerűen használják.
- ROS kommunikáció RS232 、 USB
- Automatikus töltési útmutató LIDAR + infravörös érzékelő
termék leírás
termék leírás
Vizsgálat
2026 Shenzhen ABT Electronics CO.,LTD Minden jog fenntartva.